
现在常用的电平标准有TTL、CMOS、LVTTL、LVCMOS、ECL、PECL、LVPECL、RS232、RS485等,还有一些速度比较高的 LVDS、GTL、PGTL、CML、HSTL、SSTL等。下面简单介绍一下各自的供电电源、电平标准以及使用注意事项。TTL全名:Transistor-Transistor Logic 三极管结构。Vcc:5V;VOH>=2.4V;VOL<=0.
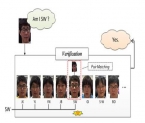
标签: 阅读更多FaceRecognition-拉姆达实验室斯蒂芬弄的。示例代码和图形演示点击http://api.lambdal.com/docs,我们的API提供了面部识别,面部检测,眼睛定位,鼻子定位,嘴巴定位,和性别分类。如果您有任何疑问,只需发一封邮件到s@lambdal.com。Face(Detection)-计算机视觉面部识别和面部检测
标签: 阅读更多通过单眼摄像头复原3D模型 为了能够通过单眼摄像头实现3D识别,SfM(Structure from Motion)的技术。采用的方法是,移动摄像头的位置,获得视点不同的多个图像,然后对这些图像加以
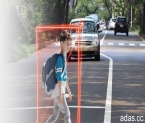
标签: 阅读更多关注公众号回复: 人脸识别库 访问源文下载地址 以往的人脸识别主要是包括人脸图像采集、人脸识别预处理、身份确认、身份查找等技术和系统。现在人脸识别已经慢慢延伸到了ADAS中的驾驶员检测、行人跟踪、甚至到了动态物体的跟踪。由此可以看出,人脸识别系统已经由简单的图像处理发展到了视频实时处理。而且算法已经由以前的Adaboots、PCA等传统的
标签: 阅读更多现在常用的电平标准有TTL、CMOS、LVTTL、LVCMOS、ECL、PECL、LVPECL、RS232、RS485等,还有一些速度比较高的 LVDS、GTL、PGTL、CML、HSTL、SSTL等。下面简单介绍一下各自的供电电源、电平标准以及使用注意事项。TTL全名:Transistor-Transistor Logic 三极管结构。Vcc:5V;VOH>=2.4V;VOL<=0.
标签: 阅读更多通过单眼摄像头复原3D模型 为了能够通过单眼摄像头实现3D识别,SfM(Structure from Motion)的技术。采用的方法是,移动摄像头的位置,获得视点不同的多个图像,然后对这些图像加以比较,从而复原拍摄对象的三维(3D)模型。对于车载摄像头,只要车辆移动就能获得视点不同的多个图像,因此可以使用SfM制作车辆周边的简易3D模型。 获得的3D模
标签: 阅读更多

 ADAS高级驾驶员辅助系统
ADAS高级驾驶员辅助系统
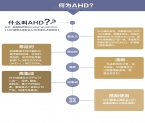 何为AHD?
何为AHD?
 计算机视觉目标检测的框架与过程
计算机视觉目标检测的框架与过程
 目标检测的图像特征提取之(一)HOG特征
目标检测的图像特征提取之(一)HOG特征
 目标检测的图像特征提取之(二)LBP特征
目标检测的图像特征提取之(二)LBP特征